We’re taking on the ambitious challenge of designing our own drone Flight Controller (FC) and Electronic Speed Controller (ESC) completely from scratch, rather than relying on off-the-shelf modules. This required us to dive deep into PCB design and power electronics, especially for the ESC, where managing high current flow, thermal performance, and signal integrity are major engineering challenges. We are currently in the prototype stage, rigorously testing and refining our design to achieve optimal performance and reliability before moving toward a production-ready version.
01. Сhallenge
We’re currently in the prototype stage of developing our own drone Flight Controller (FC) and Electronic Speed Controller (ESC) from the ground up. This process has involved several key challenges:
Component Selection: Choosing suitable microcontrollers, gate drivers, and MOSFETs that balance performance, cost, and availability.
Thermal Management: Handling high current loads and heat dissipation efficiently to ensure system reliability.
PCB Design: Designing multi-layer boards with proper copper thickness, trace width, and isolation to manage high power and signal integrity.
Firmware Integration: Developing and testing communication between the FC and ESC for stable control response.
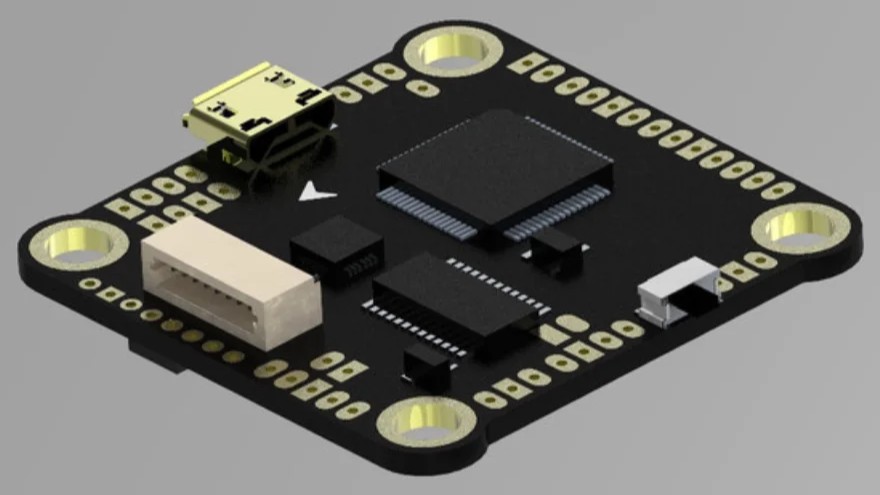
02. Features & Spec
| Parameter | Specification |
|---|---|
| Microcontroller | STM32F4 Series (32-bit ARM Cortex-M4, up to 168 MHz) |
| Gate Driver IC | DRV8833 (Dual H-Bridge Motor Driver, optimized for PWM control) |
| External Power Stage | High-current N-channel MOSFETs (low RDS(on) < 2 mΩ) |
| Supported Firmware | Compatible with BLHeli / BLHeli-S open-source ESC firmware |
| Input Voltage Range | 2S – 6S Li-Po Battery (7.4 V – 25.2 V) |
| Continuous Current | 55 A |
| Burst Current (10 sec) | 100 A |
| PWM Input Frequency | 1 kHz – 48 kHz |
| Communication Interface | Standard PWM, DShot, or Serial (UART) |
| Control Logic Voltage | 3.3 V / 5 V compatible (from STM32 MCU) |
| Protection Features | Over-temperature, Over-current, and Under-voltage lockout |
| Cooling Option | Integrated copper plane & optional aluminum heatsink |
| PCB Size | Compact design (customizable based on motor rating) |
03. Technical Readiness
63
Hardware Design
45
Firmware Development
90
Power Stage Validation
45